伺服電機控(kòng)製方式有脈衝、模擬量和通訊這三(sān)種,在不同的應用場(chǎng)景下,我(wǒ)們該如何選擇伺服電(diàn)機的控製方式呢?
1
伺服電機脈衝控製方式
在一些小型單機設備,選用脈衝控製實(shí)現電機的定(dìng)位,應該是(shì)最常見的應用方(fāng)式,這種控製方(fāng)式簡單,易於理解。
基本的控製思路:脈衝總量確定電(diàn)機位(wèi)移,脈衝頻率確(què)定電機速度。選用了(le)脈衝來實現伺服電機的(de)控(kòng)製,翻開(kāi)伺服電機的使用手冊,一般會有如下(xià)這樣的表格:
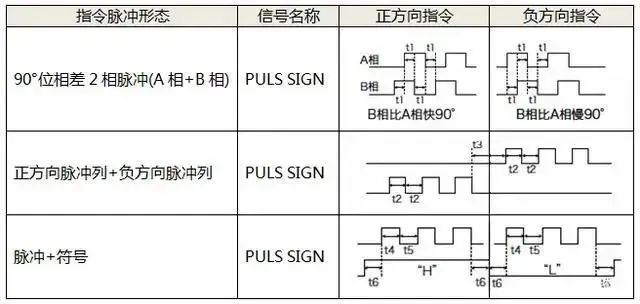
都是(shì)脈衝控製,但是實現方式並不一(yī)樣:
第一種,驅動器接收兩路(A、B路)高速脈衝,通過兩路脈衝的相位差,確定電機的旋轉方向(xiàng)。如上圖中,如果B相比A相快90度,為(wéi)正轉;那麽B相比A相慢(màn)90度,則為反轉。
運行時,這種控製的兩相脈衝為交替狀,因此我(wǒ)們也叫這樣的控製方式(shì)為差分控製。具有差分的特點,那也說明了(le)這種控製(zhì)方(fāng)式,控製(zhì)脈衝具有(yǒu)更高(gāo)的抗幹(gàn)擾能力,在一(yī)些幹擾較強的應用場景,優先選用這種方式。但是這種方式一(yī)個電(diàn)機軸需要占(zhàn)用兩路高速脈衝(chōng)端口(kǒu),對高速脈衝口緊張的情況(kuàng),比較不適用。
第二(èr)種,驅動器依然接收兩(liǎng)路(lù)高速脈衝,但是兩路高速脈衝並不(bú)同時存在,一路(lù)脈衝處於(yú)輸出(chū)狀態時(shí),另一路必須處於無效狀態。選用這種控製方式時,一定要確保在(zài)同一時刻隻有一路脈(mò)衝的輸出。兩路脈衝,一路輸出為正方向(xiàng)運行,另一路為負方向運行。和上麵的情況一樣,這種方式也是一個電機軸需要占用兩路高速脈衝端口。
第三(sān)種,隻需要(yào)給驅動器一路脈衝信號,電(diàn)機正反向運行由一路方(fāng)向IO信號確定。這種控製方式控製更加簡單,高速脈衝口資源占用也最少。在(zài)一般(bān)的小型係統中,可以優先選用這種方(fāng)式。
2
伺服電機模擬量控製方式(shì)
在需要使用伺(sì)服電機實現速度控製的應用場景,我們可以選用模擬量來實現電機的速度控製,模擬量(liàng)的值決定了電機的運行速度。
模擬量(liàng)有兩種方式可以選擇,電壓或電流(liú)。
電壓方式:隻需要在控製信號端加(jiā)入一定大小的電壓即可,在有些場景甚至使(shǐ)用一個電位器即可實現控製,非常的簡單。但選用電壓作為控製信號,在環境複雜的場(chǎng)景(jǐng)下,電壓容易被幹擾,造成控製不穩(wěn)定。
電流方式:需要對應的電(diàn)流輸出模塊,但電流(liú)信號抗幹擾能力強(qiáng),可以使(shǐ)用在複(fù)雜的場(chǎng)景。
3
伺服電機通信控製方式
采用通信方式實現伺服電機控製的(de)常見方式有CAN、EtherCAT、Modbus、Profibus。使用通信方(fāng)式來對電機進行控製,是目前一些複雜、大係統應用場景首選的控製方式。在這種方式下,係統的大小(xiǎo)、電機軸的多少都易於裁剪,沒有(yǒu)複雜的(de)控製接(jiē)線。搭(dā)建的係統具有極高的靈活性。
4
拓展部分
伺服電機轉矩控製:
轉矩控製(zhì)方式是通過外部模擬量(liàng)的輸(shū)入或直接的地址的賦值來設定電機軸對外的輸出轉矩的大小,具體表現為(wéi)例如10V對應5Nm的話,當外部模擬量設定為5V時(shí)電機軸輸出為2.5Nm。如果電機軸負載低於(yú)2.5Nm時電機正轉,外部負載(zǎi)等於2.5Nm時電機不轉,大於2.5Nm時電機反轉(通常在有重力負載情況下產生)。可以通過即時的改變模擬量的設定來(lái)改變設定的力矩大小(xiǎo),也可通過通訊方式改變對應的地址的數值來實現。
主要應用在對材質受(shòu)力有嚴格(gé)要求的(de)纏繞和放卷裝置中,例如繞線裝置或拉光纖(xiān)設備,轉矩的設定要根據纏(chán)繞的半徑的變化隨時更改以確保材(cái)質的受力不會(huì)隨著纏繞半徑的變化而改變。
伺服電機位置控製:
位置控製模式一般是通過外部輸入的脈衝(chōng)的頻率來確定轉動速度的大小,通過脈衝的個數來(lái)確定轉動(dòng)的角度,也有些伺服可以通過通訊方式直接對速(sù)度和(hé)位移進(jìn)行賦值。由於位置模式可(kě)以對速度和位置都有很嚴格的控製,所以一般應用於定位(wèi)裝置,數控機床、印刷機械等等。
伺服電機速度模式:
通(tōng)過模擬量或脈衝頻率的輸入都可以進行轉動速度的(de)控製(zhì),在有上位(wèi)控製裝置的外環PID控製時速度模式也(yě)可以進行定位,但必須把電機的位置信(xìn)號或直接負載的位置信號給上位機反饋以做運算(suàn)用。位置模式也支持直(zhí)接(jiē)負載外環檢(jiǎn)測位置信號,此時的電機軸端的編碼器隻檢測電機轉速,位置信號就由直接的最終(zhōng)負載端的檢測裝置(zhì)來提供了(le),這樣的優點在於可以減少中間傳動過程中的誤差,增加了整個係統(tǒng)的定位精(jīng)度。
談談三環:
伺服一般為三個環控製,所謂三環就是3個閉環(huán)負反饋PID調節係統。
最內的PID環就是電流環,此環完全在伺服驅動器內部(bù)進行,通過霍爾裝置檢測驅動器給電機的各相的輸出電流,負反饋給電流(liú)的設(shè)定進行PID調節,從而(ér)達到輸出電流盡量接近等於(yú)設定電(diàn)流,電流環就是控製電機轉矩的,所以在轉矩模式下驅動器的運算最小,動態響應最快。
第2環(huán)是速度環,通過檢測的電機(jī)編碼器的(de)信號來進行負反饋PID調節,它的環內PID輸出直接就是電流環(huán)的設定,所以速(sù)度環(huán)控製時就包含了速度環(huán)和電(diàn)流環,換句話說任何模式都必須使用電流環,電流環是控製的根(gēn)本,在速度和位置控製的同時係統實際(jì)也在進行電流(轉矩)的控製以達到對速(sù)度和位置的相應控製。
第3環是位置環,它是最外環,可以(yǐ)在驅動器和電機編碼器間構建也可以在外部(bù)控製器和電機編碼器或最終負載間構建要根據實際情況(kuàng)來定。由於位置控製環(huán)內部輸出就(jiù)是速度環的設定,位置控製(zhì)模式下係(xì)統進行(háng)了所有3個環的運算,此時的係統運算量最大,動態響應速度也最(zuì)慢(màn)。
本文來源於網絡,版權歸原作者所有。但因(yīn)轉載眾多,無法確認原(yuán)作者,故(gù)僅標明轉載來源。
服務熱線:0371-60298207 13383812899
公司傳真:0371-60298207
公司郵箱:nhauto@lyyzsb.com
公司地址:河南省新鄭(zhèng)市薛(xuē)店鎮中德產業園47-4號樓
技術支持:鄭州網站製作 豫ICP備2020034884號-1
 官(guān)方微(wēi)信公眾號
官(guān)方微(wēi)信公眾號